全国免费服务热线:400-023-1126
咨询电话:13696449085 15909374327
传真:023-67601126
联系人:朱先生
QQ:288 133 2909 / 288 133 2908
Email:zhugangdi@163.com
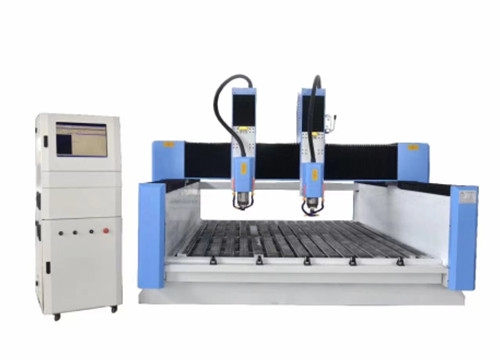
石材雕刻机的数控系统常用的算法有以下几类:
插补算法
插补算法用于实现刀具轨迹与工件轮廓一致,对于复杂曲线,通常通过直线/圆弧逼近需要加工的曲线,再根据输入的基本数据产生基本线型并完成轮廓轨迹拟合。常见的插补算法有:
逐点比较法直线插补:通过坐标与进给速度指令的组合,以指定速度将刀具从当前点直线移动到目标点,地址指定的进给速度为刀具中心运动方向的线速度,常用于实现简单直线轨迹的插补。
圆弧插补:使刀具在指定平面内沿指定圆弧方向运行到终点,也是通过相应算法根据圆弧起点、圆心、终点坐标值等产生圆弧轨迹。遗传 - 神经网络优化插补:采用遗传算法和BP神经网络算法,可显著强化插补功能,简化计算过程,提高插补效率,改善刀具路径精度和表面光顺性,解决复杂型面加工难题。
路径规划算法
路径规划算法的核心目标是寻找一条较优路径,使雕刻机在工件上的移动时间短,同时保证加工精度,常用的有:
A*算法:结合启发式搜索策略,通过评估函数评估路径的优劣,能够快速找到优路径,可提高路径规划的速度和精度,在雕刻路径规划中应用价值较高。Dijkstra算法:适用于求解短路径问题,但在雕刻过程中,由于路径长度并非唯一考虑因素,其计算量较大,应用相对有限,一般用于静态环境下的短路径计算。遗传算法:通过模拟生物进化过程来优化雕刻路径,具有全局优化能力,适用于复杂雕刻路径的规划,可对雕刻路径进行全局搜索和优化。
误差补偿算法
误差补偿算法根据雕刻过程中的误差实时调整雕刻参数,保证加工精度,常见的有:
逆向运动学:根据雕刻机的运动轨迹,推算出雕刻头的实际位置,进而调整加工参数,以减小加工误差。前向运动学:根据雕刻头的实际位置和加工参数,推算出雕刻机的运动轨迹,辅助进行误差补偿和路径修正。
运动控制算法
运动控制算法用于调整雕刻机的运动状态,实现准确的雕刻轨迹,常见的有:
PID控制算法:因其简单、稳定和易于实现而被广泛应用于运动控制领域。在石材雕刻机控制系统中,用于调整伺服电机的速度和位置,以实现准确的雕刻轨迹。例如,通过优化PID控制算法的参数,可使雕刻速度的稳定度达到较高水平,位置精度达到较高精度。
模糊控制算法:适用于处理非线性、不确定性和时变性的控制问题。在雕刻机控制系统中,可用于处理雕刻过程中出现的动态变化,如材料硬度变化、雕刻刀磨损等,使系统在复杂的工作条件下保持稳定的雕刻效果。
神经网络控制算法:模拟人脑神经元的工作方式,实现对复杂控制问题的自适应学习。在石材雕刻机控制系统中,可用于预测雕刻过程中的不确定因素,如材料特性变化、雕刻刀磨损等,通过学习和调整自动优化控制策略,提高雕刻效率。
其他算法
自适应控制算法:能够根据雕刻过程中的实时数据调整控制参数,提高系统的适应能力,以应对雕刻过程中可能出现的各种不确定性和干扰。
鲁棒控制算法:在面对系统参数变化和外部干扰时,能够保持系统的稳定性和性能,确保雕刻机在复杂工况下仍能正常工作。
 在线咨询
在线咨询